Durability of Motor Learning by Observing
Durability of Motor Learning by Observing
Mangos, N.; Forgaard, C. J.; Gribble, P. L.
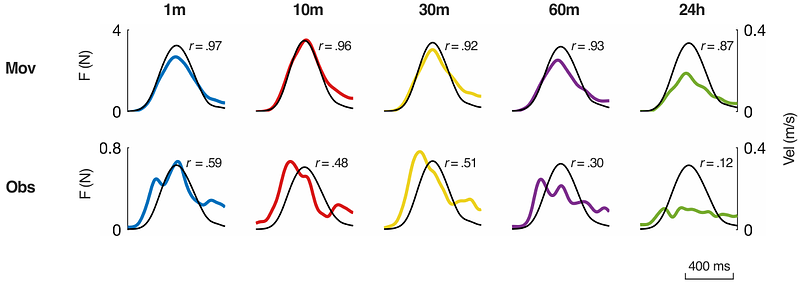
AbstractInformation about another person\'s movement kinematics obtained through visual observation activates brain regions involved in motor learning. Observation-related changes in these brain areas are associated with adaptive changes to feedforward neural control of muscle activation and behavioural improvements in limb movement control. However, little is known about the stability of these observation-related effects over time. Here we used force channel trials to probe changes in lateral force production at various time points (1 min, 10 min, 30 min, 60 min, 24 h) after participants either physically performed, or observed another individual performing upper limb reaching movements that were perturbed by novel, robot-generated forces (a velocity-dependent force-field). Observers learned to predictively generate directionally and temporally specific compensatory forces during reaching, consistent with the idea that they acquired an internal representation of the novel dynamics. Participants who physically practiced in the force-field showed adaptation that was detectable at all time points, with some decay detected after 24 h. Observation-related adaptation was less temporally stable in comparison, decaying slightly after 1 h and undetectable at 24 h. Observation induced less adaptation overall than physical practice, which could explain differences in temporal stability. Visually acquired representations of movement dynamics are retained and continue to influence behavior for at least one hour after observation.