Invariance is Key to Generalization: Examining the Role of Representation in Sim-to-Real Transfer for Visual Navigation
Invariance is Key to Generalization: Examining the Role of Representation in Sim-to-Real Transfer for Visual Navigation
Bo Ai, Zhanxin Wu, David Hsu
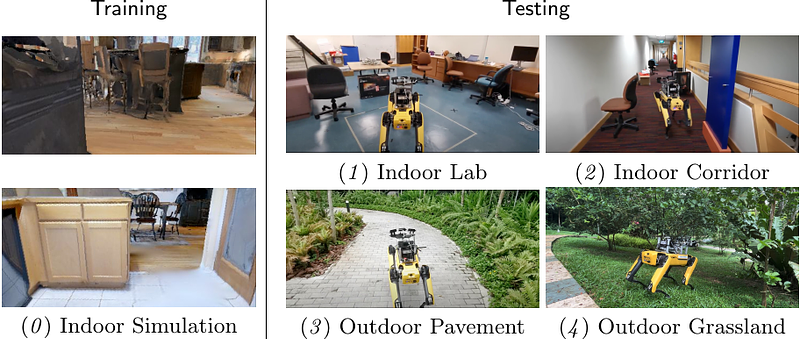
AbstractThe data-driven approach to robot control has been gathering pace rapidly, yet generalization to unseen task domains remains a critical challenge. We argue that the key to generalization is representations that are (i) rich enough to capture all task-relevant information and (ii) invariant to superfluous variability between the training and the test domains. We experimentally study such a representation -- containing both depth and semantic information -- for visual navigation and show that it enables a control policy trained entirely in simulated indoor scenes to generalize to diverse real-world environments, both indoors and outdoors. Further, we show that our representation reduces the A-distance between the training and test domains, improving the generalization error bound as a result. Our proposed approach is scalable: the learned policy improves continuously, as the foundation models that it exploits absorb more diverse data during pre-training.