Flexible Informed Trees (FIT*): Adaptive Batch-Size Approach for Informed Sampling-Based Planner
Flexible Informed Trees (FIT*): Adaptive Batch-Size Approach for Informed Sampling-Based Planner
Liding Zhang, Zhenshan Bing, Kejia Chen, Lingyun Chen, Fan Wu, Peter Krumbholz, Zhilin Yuan, Sami Haddadin, Alois Knoll
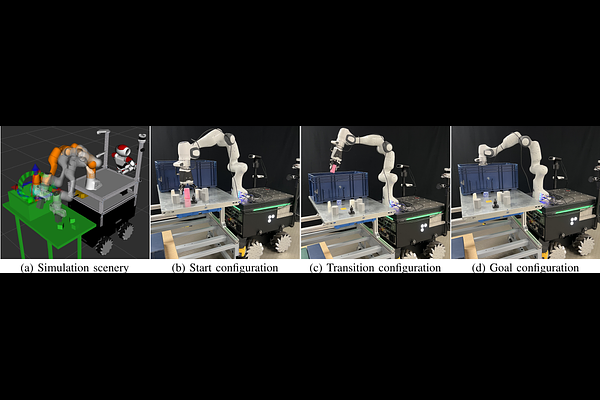
AbstractIn modern approaches to path planning and robot motion planning, anytime almost-surely asymptotically optimal planners dominate the benchmark of sample-based planners. A notable example is Batch Informed Trees (BIT*), where planners iteratively determine paths to groups of vertices within the exploration area. However, maintaining a consistent batch size is crucial for initial pathfinding and optimal performance, relying on effective task allocation. This paper introduces Flexible Informed Tree (FIT*), a novel planner integrating an adaptive batch-size method to enhance task scheduling in various environments. FIT* employs a flexible approach in adjusting batch sizes dynamically based on the inherent complexity of the planning domain and the current n-dimensional hyperellipsoid of the system. By constantly optimizing batch sizes, FIT* achieves improved computational efficiency and scalability while maintaining solution quality. This adaptive batch-size method significantly enhances the planner's ability to handle diverse and evolving problem domains. FIT* outperforms existing single-query, sampling-based planners on the tested problems in R^2 to R^8, and was demonstrated in real-world environments with KI-Fabrik/DARKO-Project Europe.