Digital twins of upright stance reveal mechanistic bifurcations underlying Parkinsonian sway phenotypes
Digital twins of upright stance reveal mechanistic bifurcations underlying Parkinsonian sway phenotypes
Matsui, K.; Suzuki, Y.; Smith, C. E.; Nakamura, T.; Endo, T.; Sakoda, S.; Morasso, P.; Nomura, T.
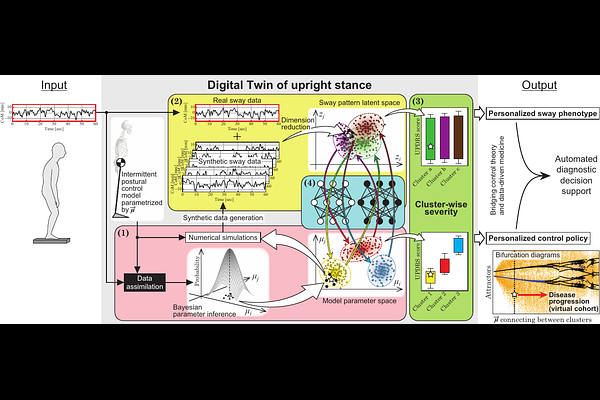
AbstractIntermittent control of upright stance optimizes the trade-off between postural deviation and control effort. While this model characterizes quiet-stance sway across diverse populations, its translation into personalized diagnostics is hindered by the inherent heterogeneity of motor disorders. Here, we present a digital twin (DT) framework for human stance, validated using datasets from healthy elderly individuals and patients with Parkinson's disease. Our DT integrates Bayesian parameter inference with latent variable analysis to establish a bidirectional mapping between mechanistic control parameters and clinical sway phenotypes. This framework enables precise disease severity classification and mechanistically explains heterogeneous sway patterns---including counterintuitive sway area reductions---as distinct parameter distributions within the model. Specifically, we demonstrate that aging- and disease-related changes manifest as bifurcations of attractors within the nonlinear intermittent control system. By augmenting clinical datasets with high-fidelity synthetic data, this DT framework overcomes the "small-data" limitation in clinical research, facilitating robust data-driven diagnostics and personalized intervention planning. This work bridges mechanistic control theory and data-driven medicine, providing a scalable foundation for the automated assessment of motor disorders through the lens of nonlinear dynamics.