UAV Pathfinding in Dynamic Obstacle Avoidance with Multi-agent Reinforcement Learning


UAV Pathfinding in Dynamic Obstacle Avoidance with Multi-agent Reinforcement Learning
Qizhen Wu, Lei Chen, Kexin Liu, Jinhu Lv
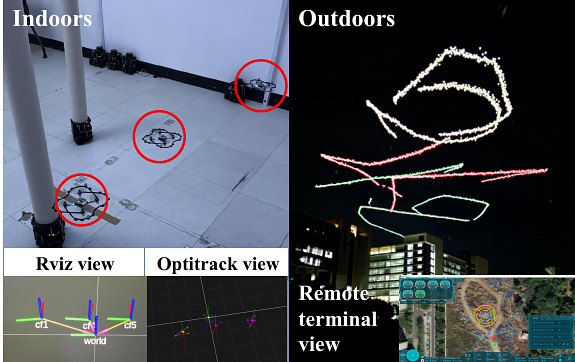
AbstractMulti-agent reinforcement learning based methods are significant for online planning of feasible and safe paths for agents in dynamic and uncertain scenarios. Although some methods like fully centralized and fully decentralized methods achieve a certain measure of success, they also encounter problems such as dimension explosion and poor convergence, respectively. In this paper, we propose a novel centralized training with decentralized execution method based on multi-agent reinforcement learning to solve the dynamic obstacle avoidance problem online. In this approach, each agent communicates only with the central planner or only with its neighbors, respectively, to plan feasible and safe paths online. We improve our methods based on the idea of model predictive control to increase the training efficiency and sample utilization of agents. The experimental results in both simulation, indoor, and outdoor environments validate the effectiveness of our method. The video is available at https://www.bilibili.com/video/BV1gw41197hV/?vd_source=9de61aecdd9fb684e546d032ef7fe7bf