Differentiable Optimization Based Time-Varying Control Barrier Functions for Dynamic Obstacle Avoidance
Differentiable Optimization Based Time-Varying Control Barrier Functions for Dynamic Obstacle Avoidance
Bolun Dai, Rooholla Khorrambakht, Prashanth Krishnamurthy, Farshad Khorrami
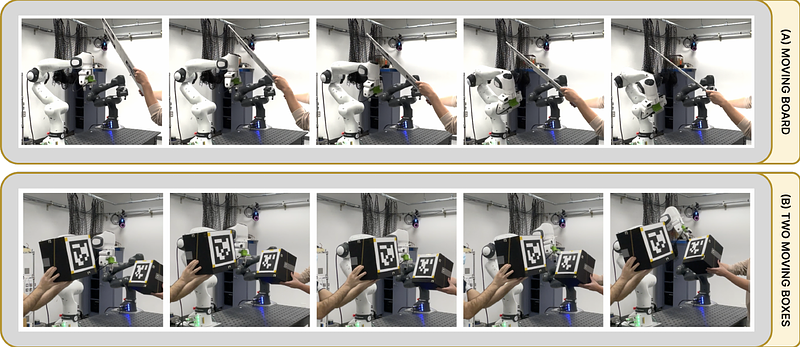
AbstractControl barrier functions (CBFs) provide a simple yet effective way for safe control synthesis. Recently, work has been done using differentiable optimization based methods to systematically construct CBFs for static obstacle avoidance tasks between geometric shapes. In this work, we extend the application of differentiable optimization based CBFs to perform dynamic obstacle avoidance tasks. We show that by using the time-varying CBF (TVCBF) formulation, we can perform obstacle avoidance for dynamic geometric obstacles. Additionally, we show how to alter the TVCBF constraint to consider measurement noise and actuation limits. To demonstrate the efficacy of our proposed approach, we first compare its performance with a model predictive control based method on a simulated dynamic obstacle avoidance task with non-ellipsoidal obstacles. Then, we demonstrate the performance of our proposed approach in experimental studies using a 7-degree-of-freedom Franka Research 3 robotic manipulator.