Closed-loop imitation learning reveals muscle-centric and latent-goal codes in primate sensorimotor cortex
Closed-loop imitation learning reveals muscle-centric and latent-goal codes in primate sensorimotor cortex
Marin Vargas, A.; Chiappa, A. S.; Perez Rotondo, A.; Mathis, M. W.; Mathis, A.
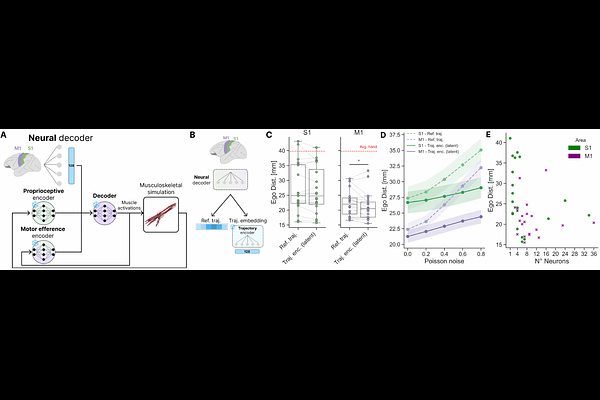
AbstractDexterous grasping requires the seamless integration of proprioceptive feedback with predictive motor commands. Yet, how cortical circuits combine afferent feedback with efference copies to support skilled hand control remains poorly understood. Here we develop a closed-loop, muscle-level model of primate grasping that integrates biomechanics, imitation learning, and neural recordings. A neural network policy trained on a 39-muscle musculoskeletal hand reproduces naturalistic pre-contact shaping and develops internal states that quantitatively explain single-neuron activity in primary motor (M1) and somatosensory (S1) cortices. Three principles emerged. First, muscle-based controllers generate representations that align more closely with cortical dynamics than joint-based controllers, despite lower kinematic accuracy. Second, recurrent architectures with temporal memory, especially LSTMs, provide an inductive bias that enhances neural predictability. Third, model-to-brain alignment peaked at the layer integrating proprioceptive and goal signals. Finally, by decoding the model's latent trajectory representation from M1, we demonstrated direct neural control of the policy: with activity from only tens of neurons, the brain-driven controller generated coherent grasp trajectories and showed markedly greater robustness to noise than joint-angle decoding. These findings reveal that S1 and M1 embed integrated, temporally structured, muscle-centric states and establish a stimulus-computable mechanistic framework for modeling sensorimotor control, while opening a novel route for creating brain-body models.