Modeling glenohumeral stability in musculoskeletal simulations: A validation study with in vivo contact forces
Modeling glenohumeral stability in musculoskeletal simulations: A validation study with in vivo contact forces
Hasan, I. M. I.; Belli, I.; Seth, A.; Gutierrez-Farewik, E. M.
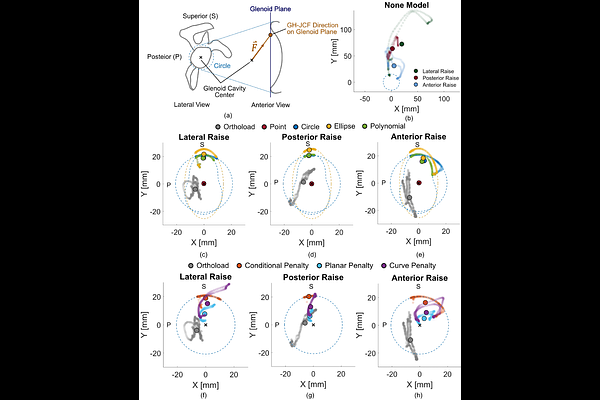
AbstractCommon optimization approaches to solve the muscle redundancy problem in musculoskeletal simulations can predict shoulder contact forces that violate joint stability with lines of action outside the glenohumeral joint border. Approaches with simple joint stability constraints were previously introduced imposing an upper limit on the direction of the contact force to stay within a specified stability perimeter. Such approaches predicted higher rotator cuff muscle activation than without constraints, but the estimated joint contact forces were oriented along the specified perimeter, raising questions about validity. In this study, several glenohumeral stability formulations were investigated, and tested against in vivo measurements of glenohumeral contact forces from the Orthoload dataset on one participant data in three dumbbell tasks: lateral raise, posterior raise, and and anterior raise. The investigated formulations either imposed inequality constraints on the contact force direction to remain within a stability perimeter whose shape was varied, or added a penalty term as a criterion measure to the objective function that made the objective function costly for contact force directions to deviate from the glenoid cavity center. All stability formulations predicted contact force magnitudes that agreed relatively well to the in vivo measured forces except for the strictest formulation that constrained the joint contact force to be directed at the glenoid cavity center. Models that restricted the force direction to lie within a specified shape estimated force vectors that largely lay along the perimeters. Models that instead penalized force directions that deviated from the glenoid cavity center estimated relatively more accurate contact force directions within the glenoid cavity, though still not entirely in agreement with in vivo measurements. Our findings support the proposed penalty formulations as more reasonable and accurate than other investigated existing glenohumeral stability formulations.