Automated Landmark-Based Root Inoculation in Arabidopsis Using Computer Vision and Robotics
Automated Landmark-Based Root Inoculation in Arabidopsis Using Computer Vision and Robotics
Mansilha, F.; Chursin, F.; Nachev, B.; Gaalen, W. v.; Matache, V.; Lube, V.; Aswegen, D. v.; Harty, D. J.; Hamond, J. v.; Meline, V.; Mendes, M. P.; Noyan, M. A.
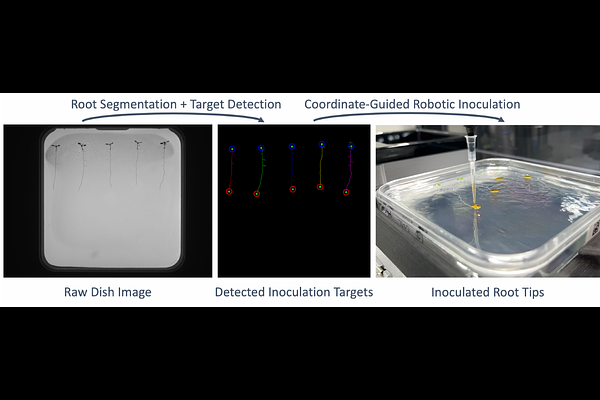
AbstractManual inoculation of plant roots is labor-intensive, spatially imprecise, and limits experimental throughput in plant-microbe interaction studies. Here, we present an integrated computer vision and robotics pipeline for automated, landmark-based root inoculation in Arabidopsis thaliana. Seedlings grown on Gelrite plates were imaged using the HADES automated phenotyping platform at the Netherlands Plant Eco-Phenotyping Centre, Utrecht University. A U-Net-based segmentation model (RootNet, F1 = 0.80) identified root structures, from which primary root tips were localized with a mean error of 0.25 mm. An affine coordinate transformation (mean target registration error: 1.09 mm) mapped image coordinates to the workspace of an Opentrons OT-2 liquid handling robot for targeted dispensing of 10 L volumes. The system achieved successful inoculation in all 17 benchmark seedlings, corresponding to 100% accuracy (95% CI: 80-100%, Clopper-Pearson), and biological validation with fluorescent bacteria confirmed successful colonization along the root axis in 9 of 10 seedlings. To our knowledge, this is the first reported demonstration of automated, landmark-based root inoculation, extending the concept of automated phenotyping from passive measurement to active robotic intervention in real-time. The pipeline is generalizable to other root landmarks and organisms, enabling precise and reproducible delivery of microorganisms to specific root locations for systematic investigation of localized plant-microbe interactions.