Modular Assembly of Biohybrid Machines Using Force-Enhanced Skeletal Muscle Actuators
Modular Assembly of Biohybrid Machines Using Force-Enhanced Skeletal Muscle Actuators
Yang, H.; Williamson, A. S.; Seok, J. M.; Ranke, D.; McGee, D.; Trotto, E.; Chin, K.; Patel, D. K.; Feinberg, A. W.; Cohen-Karni, T.; Webster-Wood, V.
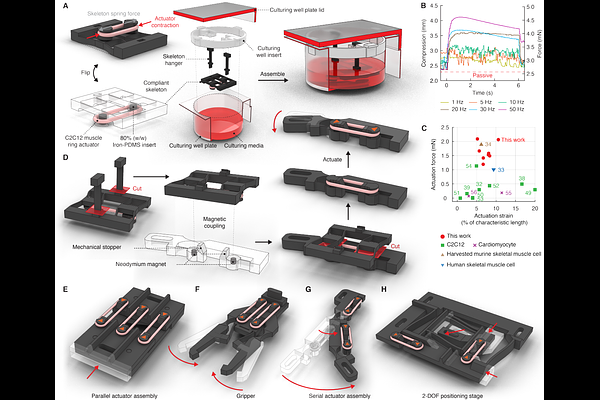
AbstractMuscle-based biohybrid systems integrate living muscle with engineered structures to create soft robots, biological models, and regenerative platforms. However, current actuators often lack strength and are difficult to assemble into complex devices. This study presents a suspended compliant skeleton that enhances muscle maturation by providing passive resistance, enabling high-stroke self-exercise without external stimulation. Using immortalized C2C12 cells, the resulting actuators achieved millimeter-scale strokes and millinewton-scale forces, surpassing previous benchmarks. Magnetic interfaces embedded in the skeleton allowed modular assembly into multi-degree-of-freedom devices such as grippers, arms, and positioning stages. These interfaces also support actuator replacement and repair, improving resilience and scalability. This approach significantly boosts engineered muscle performance and offers a robust, modular platform for building high-functioning, repairable biohybrid machines.