H-InDex: Visual Reinforcement Learning with Hand-Informed Representations for Dexterous Manipulation
H-InDex: Visual Reinforcement Learning with Hand-Informed Representations for Dexterous Manipulation
Yanjie Ze, Yuyao Liu, Ruizhe Shi, Jiaxin Qin, Zhecheng Yuan, Jiashun Wang, Huazhe Xu
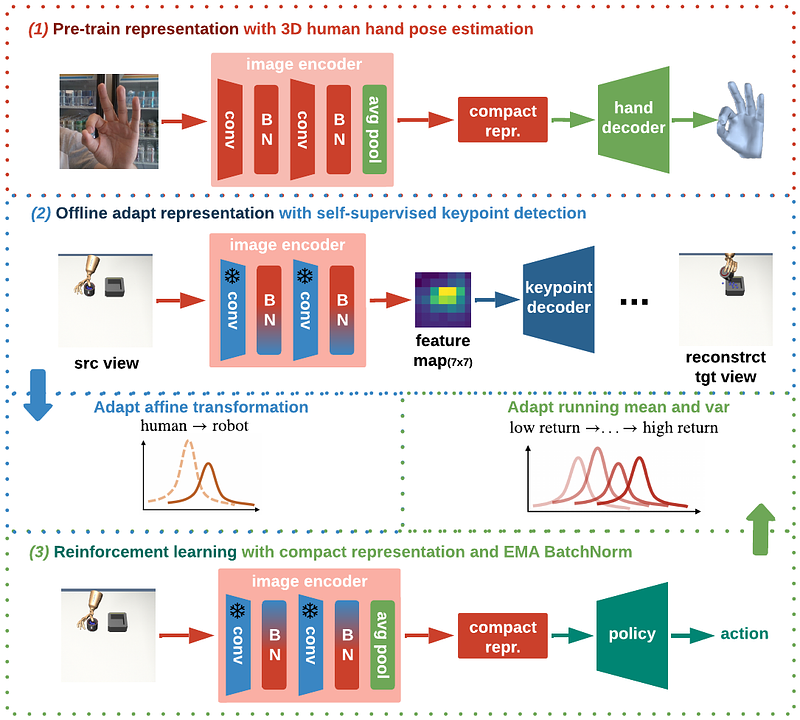
AbstractHuman hands possess remarkable dexterity and have long served as a source of inspiration for robotic manipulation. In this work, we propose a human $\textbf{H}$and$\textbf{-In}$formed visual representation learning framework to solve difficult $\textbf{Dex}$terous manipulation tasks ($\textbf{H-InDex}$) with reinforcement learning. Our framework consists of three stages: (i) pre-training representations with 3D human hand pose estimation, (ii) offline adapting representations with self-supervised keypoint detection, and (iii) reinforcement learning with exponential moving average BatchNorm. The last two stages only modify $0.36\%$ parameters of the pre-trained representation in total, ensuring the knowledge from pre-training is maintained to the full extent. We empirically study 12 challenging dexterous manipulation tasks and find that H-InDex largely surpasses strong baseline methods and the recent visual foundation models for motor control. Code is available at https://yanjieze.com/H-InDex .