Deciphering Raw Data in Neuro-Symbolic Learning with Provable Guarantees
Deciphering Raw Data in Neuro-Symbolic Learning with Provable Guarantees
Lue Tao, Yu-Xuan Huang, Wang-Zhou Dai, Yuan Jiang
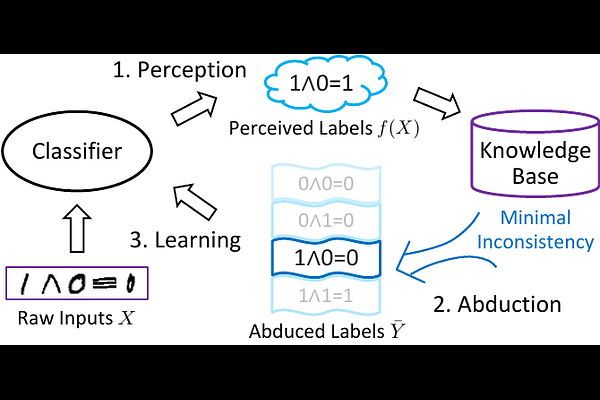
AbstractNeuro-symbolic hybrid systems are promising for integrating machine learning and symbolic reasoning, where perception models are facilitated with information inferred from a symbolic knowledge base through logical reasoning. Despite empirical evidence showing the ability of hybrid systems to learn accurate perception models, the theoretical understanding of learnability is still lacking. Hence, it remains unclear why a hybrid system succeeds for a specific task and when it may fail given a different knowledge base. In this paper, we introduce a novel way of characterising supervision signals from a knowledge base, and establish a criterion for determining the knowledge's efficacy in facilitating successful learning. This, for the first time, allows us to address the two questions above by inspecting the knowledge base under investigation. Our analysis suggests that many knowledge bases satisfy the criterion, thus enabling effective learning, while some fail to satisfy it, indicating potential failures. Comprehensive experiments confirm the utility of our criterion on benchmark tasks.