ReST: A Reconfigurable Spatial-Temporal Graph Model for Multi-Camera Multi-Object Tracking
ReST: A Reconfigurable Spatial-Temporal Graph Model for Multi-Camera Multi-Object Tracking
Cheng-Che Cheng, Min-Xuan Qiu, Chen-Kuo Chiang, Shang-Hong Lai
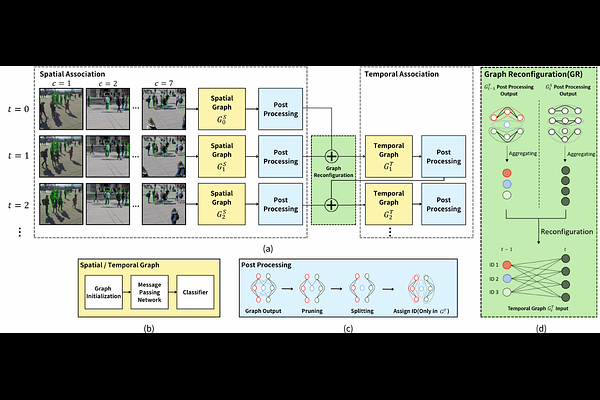
AbstractMulti-Camera Multi-Object Tracking (MC-MOT) utilizes information from multiple views to better handle problems with occlusion and crowded scenes. Recently, the use of graph-based approaches to solve tracking problems has become very popular. However, many current graph-based methods do not effectively utilize information regarding spatial and temporal consistency. Instead, they rely on single-camera trackers as input, which are prone to fragmentation and ID switch errors. In this paper, we propose a novel reconfigurable graph model that first associates all detected objects across cameras spatially before reconfiguring it into a temporal graph for Temporal Association. This two-stage association approach enables us to extract robust spatial and temporal-aware features and address the problem with fragmented tracklets. Furthermore, our model is designed for online tracking, making it suitable for real-world applications. Experimental results show that the proposed graph model is able to extract more discriminating features for object tracking, and our model achieves state-of-the-art performance on several public datasets.